3.13. OpenVX¶
OpenVX
OpenVX is an open, Khronos (https://www.khronos.org/openvx/) defined standard for cross platform acceleration of computer vision applications. OpenVX enables performance and power-optimized computer vision processing, with emphasis on embedded and real-time use cases:
- advanced driver assistance systems (ADAS)
- face, body and gesture tracking
- smart video surveillance
- object and scene reconstruction
- augmented reality
- visual inspection
- robotics and more.
Though originally intended for vision only embedded applications, it may be extended in future to non-vision applications suitable for data flow representation.
TIOVX
TIOVX is TI’s implementation of OpenVX Standard.
TIOVX allows users to create vision and compute applications using OpenVX API. These OpenVX applications can be executed on TI SoCs like AM57xx (including A15 and C66 cores), following OpenVX 1.1 standard. TIOVX also provides optimized OpenVX kernels for C66x DSP. An extension API allows users to integrate their own natively developed custom kernels and call them using OpenVX APIs.
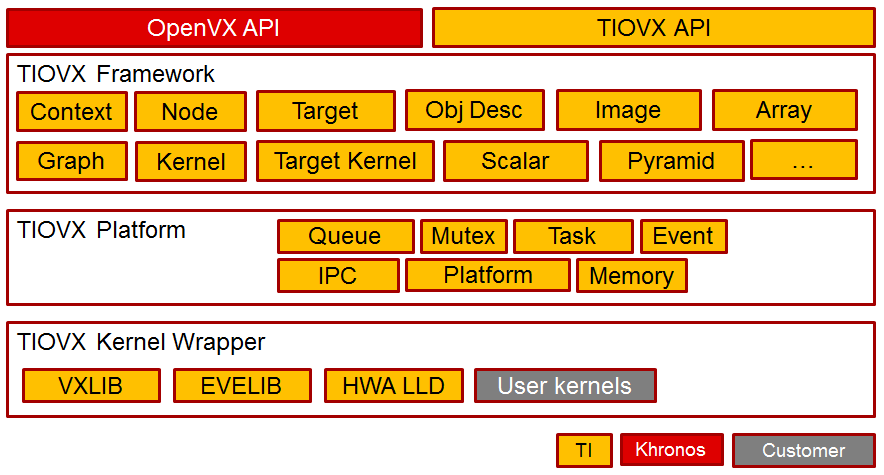
TIOVX software
| Module/Block | Description |
|---|---|
| OpenVX API | OpenVX API as defined by Khronos |
| TIOVX API | TI extensions and additional APIs in order to efficiently use OpenVX on TI platforms |
| TIOVX Framework | TI’s implementation of OpenVX spec. This layer is agnostic of underlying SoC, OS platform |
| TIOVX Platform | This layer binds TIOVX framework to a specific platform. Ex, Processor Linux SDK for AM57xx SOCs. This layer also binds TIOVX framework to a specific OS like Linux or TI-RTOS |
| TIOVX Kernel Wrapper | Kernel wrappers allow TI and customers to integrate a natively implemented kernel into the TIOVX framework. |
| TIOVX Conformance tests | OpenVX conformance test from Khronos to make sure an implementation implements OpenVX according to specification. |
There are two versions of VXLIB kernels: without BAM framework, and with BAM framework. BAM is a low level framework representing directed acyclic graph, where EDMA transfers are heavily utilized to bring 2D memory objects to higher speed L2 memory, thus improving performance almost twofold.
Current release has kernels with BAM framework. This framework achieves higher performance via heavy use of EDMA, which brings blocks of data from remote DDR memory to local L2, while DSP does the processing. List of these kernels can be checked in https://git.ti.com/processor-sdk/tiovx/trees/master/kernels/openvx-core/c66x/bam.
TIOVX DSP Kernels (in VXLIB)
There are 44 kernels in current release of VXLIB (typically there are multiple implementations for different data types).
Here is complete list of DSP kernel wrappers (wrappers are part of TIOVX):
- AbsDiff
- AccumulateSquare
- Accumulate
- AccumulateWeighted
- Add
- BitwiseAnd
- BitwiseNot
- BitwiseOr
- BitwiseXor
- Box3x3
- CannyEd
- ChannelCombine
- ChannelExtract
- ColorConvert
- ConvertDepth
- Convolve
- Dilate3x3
- EqHist
- Erode3x3
- Gaussian3x3
- HalfscaleGaussian
- HarrisCorners
- Histogram
- IntegralImage
- Lut
- Magnitude
- MeanStdDev
- Median3x3
- MinMaxLoc
- Multiply
- NonLinearFilter
- Phase
- Sobel3x3
- Subtract
- Threshold
TIOVX in Processor Linux SDK on AM57xx EVM
Following TIOVX components are present in EVM filesystem:
| Type | File path | Description |
| application | /usr/bin/tiovx-app_host | Statically linked Linux application running several thousands test cases, with all available kernels and using different test vectors |
| DSP firmware | /lib/firmware/dra7-dsp1- fw.xe66.openvx, /lib/firmware/dra7-dsp 2-fw.xe66.openvx |
DSP firmware including DSP side of TIOVX framwork implementation, IPC implementation, DSP kernels (part of VXLIB DSP library) - for DSP1. This firmware is loaded at boot time, or using procedure mentioned below (to switch from OCL firmware to TIOVX firmware) |
TIOVX release 1.0.0.0 runs exclusively wrt OpenCL, as both firmwares use common resources DSP cores and CMEM memory. That is: application can be either TIOVX-based, or OpenCL -based. Future releases may remove this limitation and use static split in resources (between OpenCL and OpenVX). TIOVX needs CMEM memory with two blocks: block 0 is big DDR block for exchange of big buffers (>100MB) and block 1 (~1MB) which is used as shared memory visible from all cores to exchange shared data objects (typically in OCMC)
Switch from OpenCL to OpenVX firmware:
Run the command below to switch from OpenCL to OpenVx firmware:
reload-dsp-fw.sh tiovx # load openvx firmware and restart dsps
Run TIOVX test application
First, it is necessary to copy test vectors from https://git.ti.com/processor-sdk/tiovx/trees/master/conformance_tests/test_data to EVM filesystem (e.g. ~/tiovx/test_data).Then run following commands:
export VX_TEST_DATA_PATH=/home/root/tiovx/test_data # Set environment variable to point to location of test vectors on EVM
tiovx-app_host 2>&1 | tee log.txt # Run test application, and log output to log.txt
At the end of test (taking roughly 24mins) you can expect report like this:
...
[ N7 ] Execution time for 307200 pixels (avg = 3.584000 ms, min = 3.584000 ms, max = 3.584000 ms)
[ N8 ] Execution time for 307200 pixels (avg = 171.797000 ms, min = 171.797000 ms, max = 171.797000 ms)
[ N9 ] Execution time for 307200 pixels (avg = 366.952000 ms, min = 366.952000 ms, max = 366.952000 ms)
[ G4 ] Execution time for 307200 pixels (avg = 500.146000 ms, min = 500.146000 ms, max = 500.146000 ms)
[ N1 ] Execution time for 256 pixels (avg = 0.278000 ms, min = 0.278000 ms, max = 0.278000 ms)
[ N2 ] Execution time for 256 pixels (avg = 0.230000 ms, min = 0.230000 ms, max = 0.230000 ms)
[ N3 ] Execution time for 256 pixels (avg = 0.281000 ms, min = 0.281000 ms, max = 0.281000 ms)
[ N4 ] Execution time for 256 pixels (avg = 0.303000 ms, min = 0.303000 ms, max = 0.303000 ms)
[ N5 ] Execution time for 256 pixels (avg = 0.285000 ms, min = 0.285000 ms, max = 0.285000 ms)
[ G5 ] Execution time for 256 pixels (avg = 2.169000 ms, min = 2.169000 ms, max = 2.169000 ms)
[ N1 ] Execution time for 256 pixels (avg = 0.243000 ms, min = 0.243000 ms, max = 0.243000 ms)
[ N2 ] Execution time for 256 pixels (avg = 0.301000 ms, min = 0.301000 ms, max = 0.301000 ms)
[ G6 ] Execution time for 256 pixels (avg = 0.871000 ms, min = 0.871000 ms, max = 0.871000 ms)
[ N1 ] Execution time for 256 pixels (avg = 0.352000 ms, min = 0.352000 ms, max = 0.352000 ms)
[ N2 ] Execution time for 256 pixels (avg = 0.246000 ms, min = 0.246000 ms, max = 0.246000 ms)
[ N2 ] Execution time for 256 pixels (avg = 0.324000 ms, min = 0.324000 ms, max = 0.324000 ms)
[ G7 ] Execution time for 256 pixels (avg = 1.502000 ms, min = 1.502000 ms, max = 1.502000 ms)
[ N1 ] Execution time for 256 pixels (avg = 75.37000 ms, min = 75.37000 ms, max = 75.37000 ms)
[ G8 ] Execution time for 256 pixels (avg = 60.474000 ms, min = 60.474000 ms, max = 60.474000 ms)
[ DONE ] tivxMaxNodes.MaxNodes/0/few_strong_corners/MIN_DISTANCE=3.0/SENSITIVITY=0.10/GRADIENT_SIZE=3/BLOCK_SIZE=5/k=3/VX_INTERPOLATION_NEAREST_NEIGHBOR
[ -------- ] 1 tests from test case tivxMaxNodes
[ ======== ]
[ ALL DONE ] 6217 test(s) from 110 test case(s) ran
[ PASSED ] 6217 test(s)
[ FAILED ] 0 test(s)
[ DISABLED ] 7397 test(s)
To be conformant 6217 required test(s) must pass. Disabled 7397 test(s) are optional.
#REPORT: 20170927134830 ALL 13614 7397 6217 6217 6217 0 (version 1.1-20170301)
<-- main:
Please note that last ~3000 lines of test log include performance data (execution time and number of pixels processed) useful for further evaluation.
Switch from OpenVX, back to OpenCL firmware:
After finishing running the TIOVX test application, switch the firmware back to the default for OpenCL:
reload-dsp-fw.sh opencl # load opencl firmware and restart dsps
Recompile TIOVX (using Yocto build)
MACHINE=am57xx-evm bitbake arago-core-tisdk-image
MACHINE=am57xx-evm bitbake tiovx-lib-host -f -c compile
MACHINE=am57xx-evm bitbake tiovx-lib-host
MACHINE=am57xx-evm bitbake tiovx-app-host -f -c compile
MACHINE=am57xx-evm bitbake tiovx-app-host